






 연구논문
연구논문



 프로젝트
프로젝트

 퍼스널 로봇
퍼스널 로봇
|
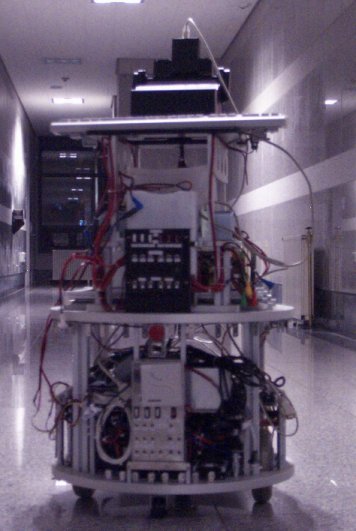
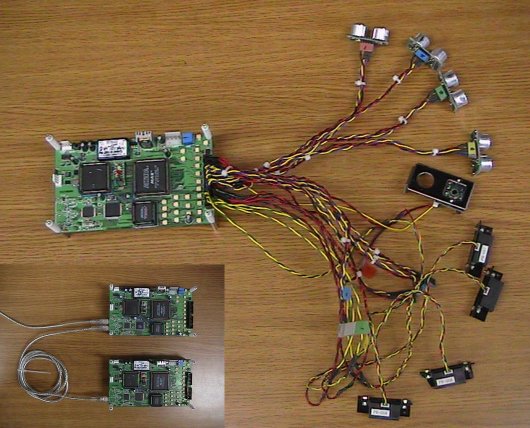
IEEE1394통신을 이용한 퍼스널로봇의 센서보드 개발 한국생산기술연구원과 공동으로 개발중인 차세대 퍼스널 로봇은 real-time을 구현하기 위해 Linux와 RT-linux를 기본 OS로 사용하고 있으며 Arm의 모터 제어를 위한 CAN통신, 로봇의 이동 중 장애물을 인식하는 센서 모듈과의 통신은 IEEE1394를 사용하고 있다. IEEE1394는 400M의 초고속 통신을 지원하며 대량의 정보를 DMport를 이용하면 실시간 전송이 가능하다. Phy Layer Chip의 2개의 연결 포트를 이용하여 추가적인 모듈의 부착이 가능하며 PnP방식을 지원 시스템의 변화에 즉시 대처할 수 있도록 되어있다. 로봇의 센서 보드는 16개의 초음파 센서와 8개의 적외선 센서 그리고 4개의 인체 열감지형 센서를 가지고 있어 이들의 정보를 마이크로컨트롤러를 이용하여 장애물과의 거리를 측정, 그 데이터를 IEEE1394를 통해 로봇의 Main CPU로 전송하게 된다. | |
|
|
|
 배전 자동화
배전 자동화
|
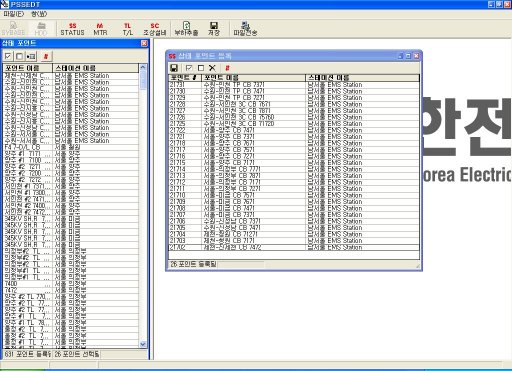
계통해석 및 다중 TCP/IP 프로그램 개발 전국에 있는 10개의 관리처에서 실시간으로 계측되는 송배전 선로의 전력 상황 데이터와 변전소의 상태 및 포인트를 감시, 저장하고, 이를 다시 다른 사업소로 중계하는 UNIX 환경에서 실행되는 다중 TCP/IP 서버와 이를 지원하기 위한 PC 환경에서 실행되는 환경 설정 프로그램(TcpEdt)을 개발하였으며, 특정 상황 발생 시 고장 원인을 분석하기 위한 각종 상태를 기록하는 UNIX 환경에서 실행되는 PSSE 서버 및 이를 지원하는 PC 환경에서 실행되는 환경 설정 프로그램(PssEdt)를 개발 하였다. | |
 |
 |
|
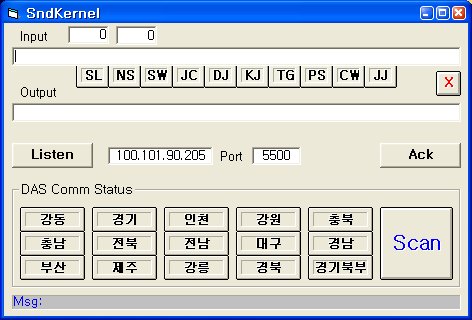
배전 자동화를 위한 SCADA-DAS 연계 프로그램 개발 이 시스템은 선로의 상태 및 부하상태, 변전소의 운전상태를 실시간으로 감시하는 SCADA PIS와 지점의 DAS 주 장치와의 신뢰성 있는 정보교환이 필요한데, 현재 운용되고 있는 시스템의 통신방식이 달라 두 시스템 사이의 통신 연계가 안되고 있다.
| |
 건설장비자동화
건설장비자동화
|
크레인용 밸런스 빔 제어기 실용화 |
 |
|
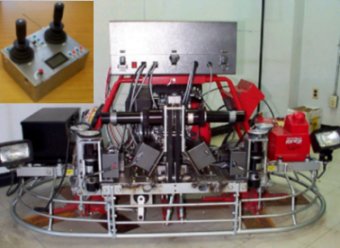
본 연구는 회전제어 밸런스 빔 제어기 개발 프로젝트에 이은 실용화 모델 개발의 문제점을 보안하기 위해 제어보드와 밸런스 빔을 재설계를 수행하였다. 삼성물산 장비연구소의 지원아래 신승기술센터와 협력하여 휠 및 짐벌 구동을 위한 제어장치와 사용자 사이의 명령 및 상태표시를 위한 양방향 무선 리모콘을 개발하였다. 연구목표가 실용화에 있는 만큼 신뢰성 향상을 위한 기술이 요구된다. | |
|
|
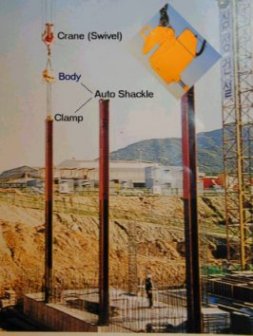
자동샤클 제어기 개발 |
|
삼성에서 개발한 원격조정 자동 샤클을 수직 빔 설치 시 안전확보 및 작업효율 증대를 위해 크레인에 의해 운반된 건설자재를 원격에서 자동 해체하는 건설장비로써 그 동작의 신뢰성을 향상시키는 과제로 진행된 프로젝트이다. 연구목표로는 센서동작 신뢰성 향상과 무선부 동작 설계, 동력전달기구 설계 등을 들 수 있으며 본 연구를 위하여는 모터 제어기술, RF 무선통신, 기구동력전달원리, 센서 및 신호처리 기술이 요구된다. | |
|
공중 부하 자세제어를 위한
|
선회제어 밸런스 빔
|
|
자이로 액튜에이터 제어에 관한 연구 크레인에 의하여 줄에 매달려 이동중인 물체나 공중에 떠있는 물체의 자세를 제어하기 위한 구동체 설계 및 그 동특성 분석을 위한 연구이다. 본 연구를 위하여는 자이로의 원리 및 그 역학, 모터 제어기술, 컴퓨터관련 기술, 센서 및 신호처리 기술이 요구된다. | |

 서보 제어기
서보 제어기
|
CAN 통신을 이용한 다중모터 위치제어기 구현 87C196CA를 이용하여 DC 모터 제어기를 구성하고 이를 다시 CAN으로 연결하여 두 제어기가 동기 되어 작동하도록 한다. 본 연구를 위하여는 모터 제어기술, 마이크로프로세서 응용 기술, 센서 및 신호처리 기술이 요구된다. |
이동로봇
|
순응성 발목을 갖는 2족 보행로봇의 개발 |
|
|
인간과 같이 유연한 발목을 갖는 두발로 보행하는 로봇 개발을 연구 목표로 한다. 1차년도에서는 발목관절을 제어하기 위한 알고리즘 도출을 목표로 하며, 2차년도에서는 2족 보행 로봇을 제작 완성한다. 본 연구를 위하여는 모터 제어기술, 로보트 설계및 제어기술, 컴퓨터관련 기술, 센서 및 신호처리 기술이 요구된다. |

|
미장로봇의 서보제어 기술개발 |
 |
|
"지능형 이동로봇의 개발: 콘크리트 미장로봇에의 응용"의 2차년도 위탁과제로, 엔진 탑재형 미장기계의 무인 자동화를 목표로 한다. 쌍발 회전날개의 회전속도 제어, 양 날개의 마찰력 차이를 이용한 이동방향 제어, 회전 날개의 각도 조정을 통한 콘크리트 바닥의 다짐정도 조정이 본 연구의 주요 항목이며, KIST에서 개발하는 자기위치 인식, 비젼을 통한 바닥면 상태 인식, 미장 경로생성 프로그램 및 각종 사용자 접속 GUI와의 접속을 필요로하여, 모터 제어기술, 센서접속기술 및 GUI 프로그램 기술이 요구된다. |
|
지능형 이동로봇의 개발 : 콘크리트 미장로봇에 응용 지능형 제어 기법을 건설 현장에서의 콘크리트 작업을 하는 미장 로봇에 응용하는 연구이다. 각종 센서를 통하여, 작업 공간의 장애물을 스스로 인식, 판단하여 이동하며, 작업 경로 및 장소, 우선 순위 등을 지능적으로 판단함으로서 효율적인 작업을 수행하도록 하는 연구이다. 이를 위해서, CAD 데이터로부터 최적 자동 경로 설정 및 시행 기능, 자동 위치 보정 기능, 자동 충돌 방지, 경로 수정 및 경로 회복 기능이 과학기술원과 공동으로 개발 완료되었다. |
|
두발 보행 로봇 제어를 위한 소프트웨어 설계 인간의 발목 관절의 특성을 모사한 기구적 제약 조건과 스프링으로 구성된 발목 관절을 갖는 두발 보행 로봇의 보행에 대한 연구이다. 보행로봇을 위한 순응성 발목 관절 제시 및 이를 위한 지능형 제어기 제시가 주요 내용이며, 로봇 동력학 해석 및 관련 제어기 술이 핵심이다. |
로봇제어
|
상부시변 부하를 갖는 2축 도립진자의 위치제어 두발 보행 로봇을 제어하기 위한 제어기 설계를 목표로 하여 걸음걸이 자세 제어에 대한 연구 단계로, 이를 모사한 2축 도립 진자 제어에 관한 실험연구이다. 이 연구를 위하여서는 모터 제어기술, 컴퓨터 하드웨어 및 소프트웨어 기술 및 로봇 공학관련 기술이 요구된다. |
|
단일구동부를 갖는 2축 도립진자의 자세제어 기존의 카트형 도립진자와는 달리 평면상에서 회전운동이 자유로운 하부 관절과 모터로 연결된 상부관절로 구성된 2축 도립 진자 제어에 관한 실험연구이다. 이 연구를 위하여서는 비선형 시스템 모델링, 피드백 선형화 기법, 퍼지제어 기술이 요구 된다. |
|
다중 로봇 협조제어 시스템 기술 개발에 관한 연구 |
기타
|
Pager 자동조정 및 검사장치의 |
 |
|
비젼(화상 인식) 기능과 기계적 검사 장치 및 각종 계측장치를 갖춘 Pager 자동조정 및 검사장치 개발의 부분으로 지능 제어 연구실에서는 이를 제어하는 소프트웨어를 개발하고 있다. 사용자 인터페이스로 터치 스크린을 이용하며, Windows95에서 실행되는 GUI 환경을 제공하여야 하며, 작동 중의 각종 데이터를 실시간 처리 및 저장하여야 하므로 Visual 프로그래밍 능력과 다중처리 프로그래밍 능력이 요구된다. 관련 하드웨어 기술로 는 HP-GPIB 제어, LonWorks network 및 직/병렬 통신 기술이 요구된다. |
|
PCS 및 Battery 원격 감시 및 |
 |
|
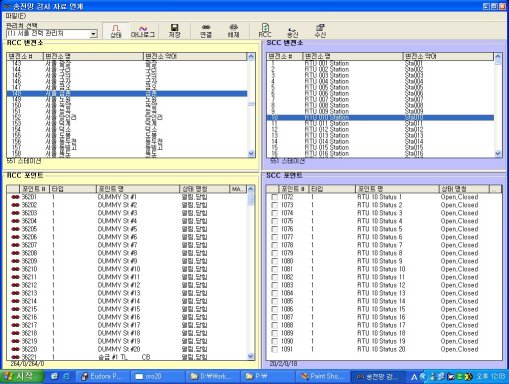
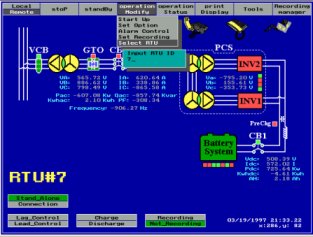
1MW급 PCS를 운용함에 있어 배전반 및 전력 변환 장치부, Battery부 등의 전기 계통 단말로부터 전송되어 오는 각종 감시 정보 및 제어 정보를 RTU(Remote Terminal Unit)에서 분석, 가공, 처리하여 전력 및 설비 계통도의 상태 및 계측치를 일괄적으로 알기 쉽게 구분하여 표시하고, 발생된 경보 및 상태 변화 감시에 대하여 일정기간 기록 할 수 있으며, 정확한 고장 분석 및 사후대책 방안도 마련한 전체 계통의 원격 감시 및 제어 시스템이다. Graphic 프로그래밍 및 실시간 데이터 처리, 실시간 통신, 모뎀을 통한 원격 통신이 주요 기술이다. |
|
Computerized Jacquard Machine의 개발 |
|
Agent형 센서/통신기기 등 전력설비 Agent와의 Multi-Agent기반의 광역 전력 계통 시스템을 개발하는 부분 중 ‘Agent형 센서/통신기기 등 전력설비 Agent와 광역 Defense시스템 연계 프로토콜 개발’을 담당 하며 새롭게 개발되는 광역 지능형 전력설비(IPIU), RCM 등 Multi-Agent기반의 광역 전력계통시스템 통합 및 구축으로 전력설비의 실시간 감시, 분석, 제어가 가능한 광역 Defense 시스템의 각 요소기술 중 각종 연계 모듈간의 연계 프로토콜 설계, 프로토콜 시뮬레이터 설계, 그리고 연계 프로토타입 개발 | |
 | |